测量模式
测量模式专为 GPS 追踪的磁力仪测量而设计——包括航空无人机系统和地面记录仪。默认以探索视图打开:您的扫描使用 GPS 轨迹叠加在实时卫星地图上。从那里您可以切换到 2D 色彩图或 3D 曲面模型。
支持的仪器
| 仪器 | 类型 |
|---|---|
| PolarWave DroneRover Light | 航空 — 入门级多传感器 |
| PolarWave DroneRover Professional | 航空 — 专业多传感器 |
| PolarWave DroneRover Enterprise | 航空 — 企业多传感器 |
| PolarWave DroneRover Enterprise Max | 航空 — 最大传感器配置 |
| FG Sensors FGA Logger | 地面 — 最多捕获两个磁通门传感器的数据 |
地图叠加需要文件中嵌入的 GPS 数据。大多数 FGA Logger 导出会自动包含此数据。如果上传后地图视图不可用,请确认测量期间 GPS 处于活动状态。如不确定,在文本编辑器中打开文件,在顶部附近查找纬度/经度列或 NMEA 语句。
上传测量文件
- 在左侧导航的"仪器"下,进入测量。
- 点击选择文件或拖放您的文件。
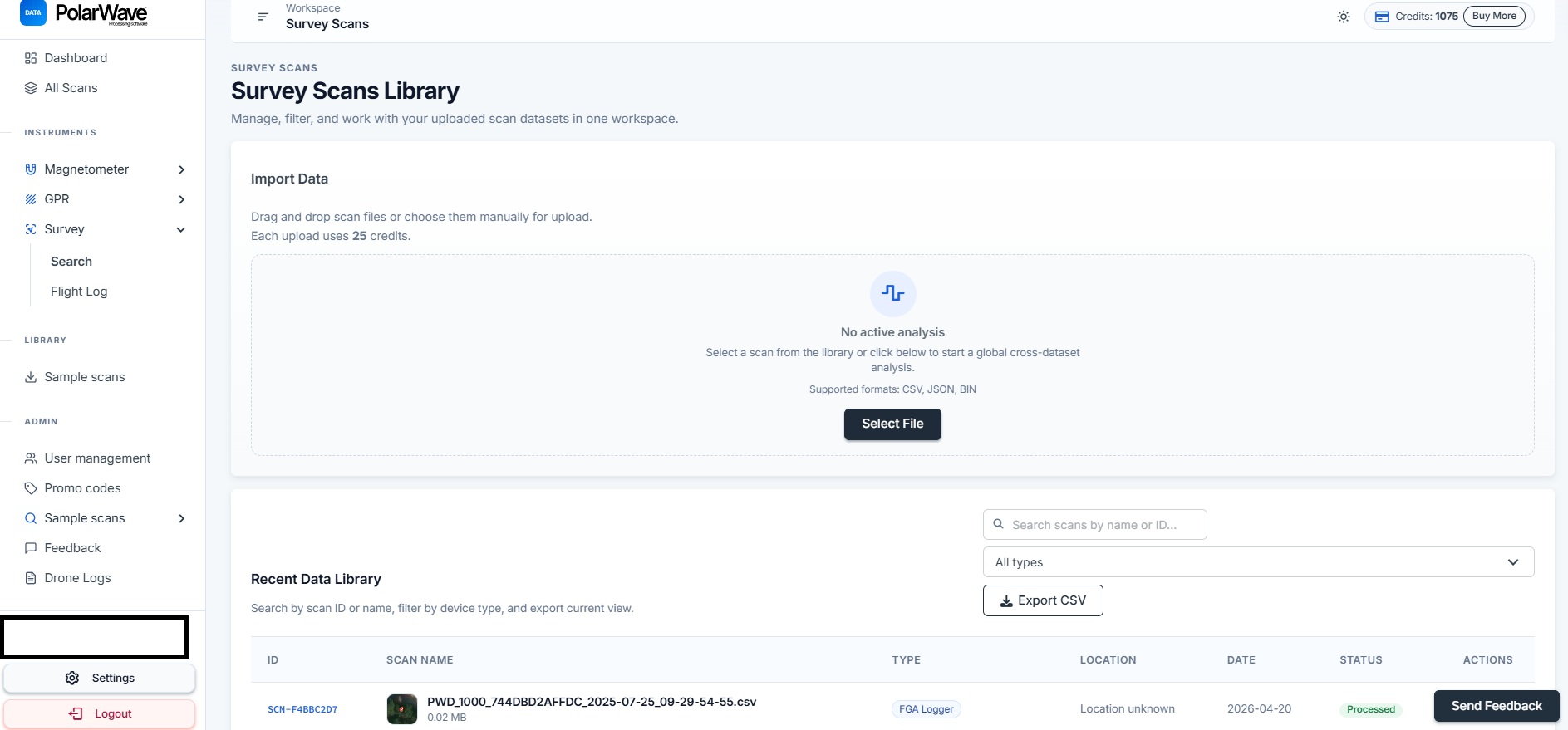
- 平台从文件名自动检测设备类型——保持原始文件名不变。
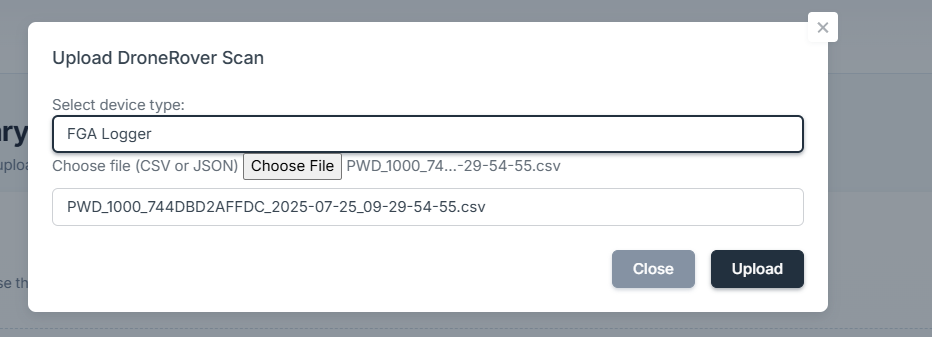
- 点击上传 — 扣除 25 积分。
- 点击新行以打开地图视图。处理通常在几秒到一分钟内完成。

视图
测量模式提供三种查看数据的方式:
探索视图(默认)
您的扫描使用 GPS 轨迹叠加在实时卫星地图上。各传感器点沿飞行或测量路径绘制。将鼠标悬停在任何点上可查看包含通道名称和场值的工具提示。
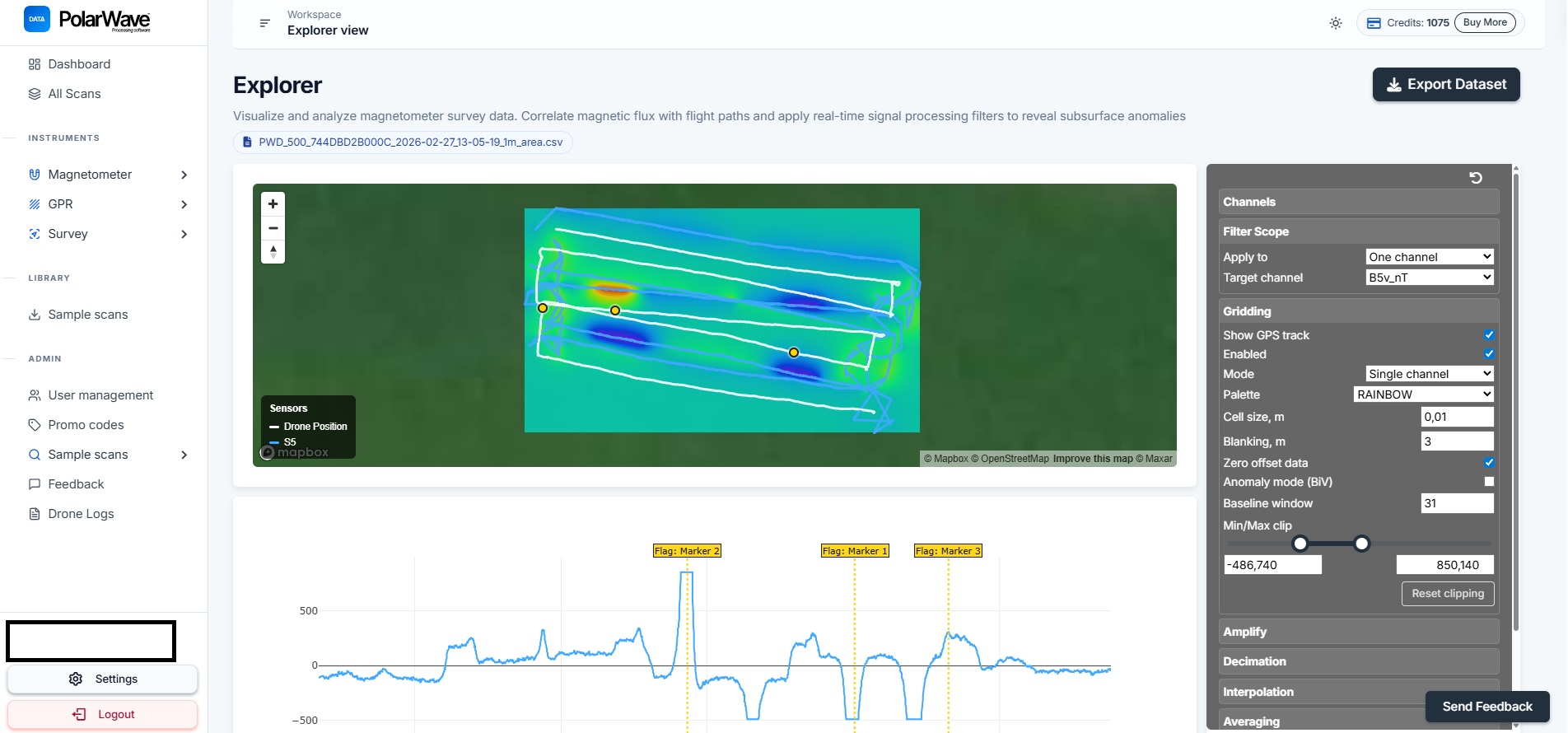
启用网格模式,在地图上直接添加颜色编码的异常叠加 — 所有选定的传感器读数被插值到规则网格上并渲染在卫星图像上,让您在真实地理背景下看到异常的形状和范围。
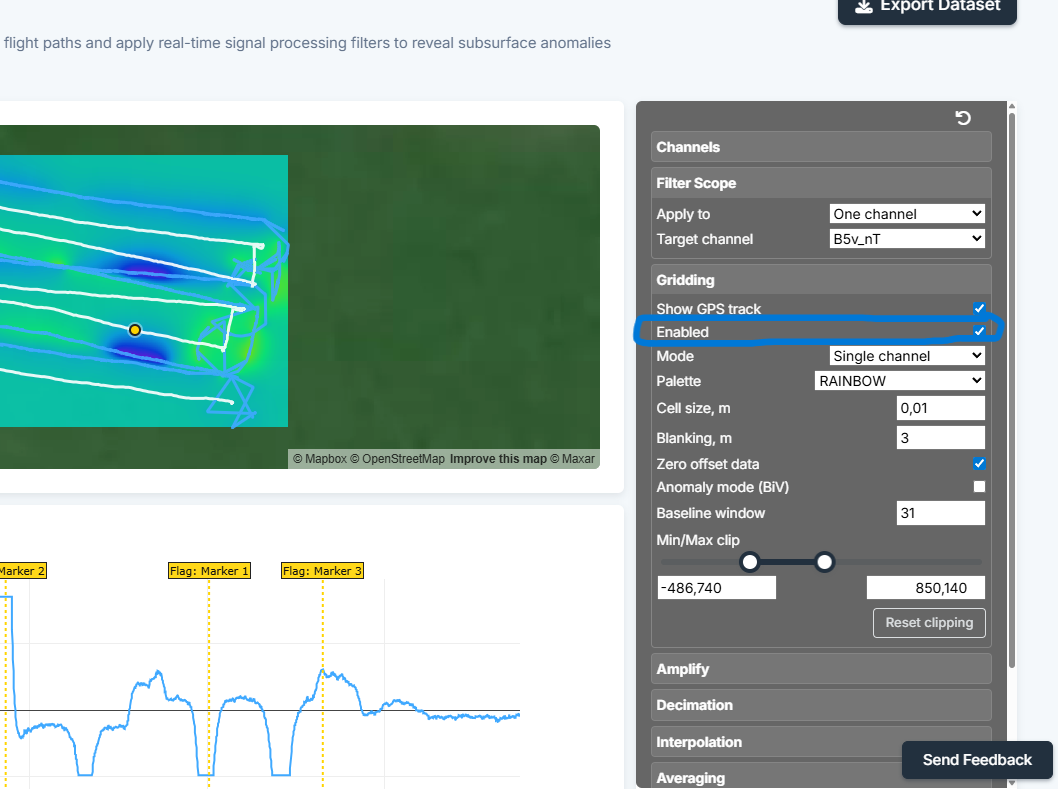
如果只出现 GPS 轨迹线而没有色彩网格,需要在右侧面板中开启网格化。
3D 曲面模型
交互式 3D 渲染,显示异常的深度和形状。峰值和谷值代表勘测区域的测量梯度变化。旋转和缩放以从任意角度检查数据。

3D 模型控件:
| 控件 | 功能 |
|---|---|
| 旋转 | 点击并拖动以旋转模型 |
| 缩放 | 向上/向下滚动 |
| 平移 | 右键点击并拖动(或双指触控板) |
| 标签 | 点击曲面在感兴趣的点放置标记 |
| 垂直夸大 | 缩放峰值和谷值的高度 |
传感器轨迹(无人机系统)
每个 DroneRover 传感器既记录各轴读数,也记录以纳特斯拉 (nT) 为单位的总矢量量级。通道名称编码传感器编号(B1–B5)、分量(各轴用 x/y/z,总矢量用 v)和单位(nT)。
可用通道数量取决于您的 DroneRover 型号——入门级系统从两个传感器开始;Enterprise Max 提供全部五个。
轴通道(每个传感器一组):
| 通道 | 描述 |
|---|---|
| B1x / B2x … B5x | 每个传感器的 X 轴读数(nT) |
| B1y / B2y … B5y | 每个传感器的 Y 轴读数(nT) |
| B1z / B2z … B5z | 每个传感器的 Z 轴读数(nT) |
矢量通道 — 在地图上显示为彩色轨迹:
| 通道 | 描述 | 颜色 |
|---|---|---|
| B1v_nT | 传感器 1 — 总矢量量级(nT) | 红色 |
| B2v_nT | 传感器 2 — 总矢量量级(nT) | 橙色 |
| B3v_nT | 传感器 3 — 总矢量量级(nT) | 黄色 |
| B4v_nT | 传感器 4 — 总矢量量级(nT) | 绿色 |
| B5v_nT | 传感器 5 — 总矢量量级(nT) | 蓝色 |
使用图例打开或关闭各个通道以隔离单个传感器,或启用全部选定将它们合并为一个网格。
异常网格
启用网格模式后,所有选定的传感器读数被合并并插值到颜色编码的叠加层上。大型测量可能需要几秒钟来渲染。
FGA Logger 通道
FGA Logger 最多记录两个磁通门传感器(B1 和 B2),每个具有三个轴加上总矢量量级。所有可用通道列在右侧面板顶部。
| 通道 | 描述 |
|---|---|
| B1x / B1y / B1z | 各轴读数 — 传感器 1 |
| B2x / B2y / B2z | 各轴读数 — 传感器 2 |
| B1v | 总矢量量级 — 传感器 1(nT) |
| B2v | 总矢量量级 — 传感器 2(nT) |
| Gx / Gy / Gz | 传感器间梯度,每轴(nT/m) |
| Gv | 总梯度矢量量级(nT/m) |
点击全部显示所有通道,无取消全选,或单独打开或关闭各通道。
Gv(总梯度)将三个轴合并为单一值,对局部异常最为敏感。大多数测量从这里开始。
传感器距离设置
将传感器距离设置为两个磁通门传感器之间的物理间距(以米为单位)。此值用于计算梯度——距离不正确会错误地缩放梯度测量值。
地图控件
调色板选择器
网格叠加层有十一种色彩调色板:
| 调色板 | 最佳用途 |
|---|---|
| Thermal | 通用异常检测 |
| Viridis | 感知均匀,适合出版物 |
| Rainbow | 最大色彩对比度 |
| Grayscale | 打印 / 无障碍 |
| Seismic | 双极 — 信号接近零时有用 |
| Inferno | 高对比度深色主题 |
| Plasma | 鲜艳,在深色背景上效果好 |
| Magma | 低光强调 |
网格化模式
- 单通道 — 每次显示一个传感器,用于单独比较传感器
- 全部选定 — 将所有可见传感器合并为单个网格
高斯归一化
重新分配色阶,使细微异常可见,即使单个强特征否则会主导显示。
采样偏移
对各个传感器应用时间对齐偏移。用于纠正传感器轨迹之间不对应真实异常的小位置偏移。
读取地图
- 放大感兴趣区域以查看各传感器轨迹点。将鼠标悬停在点上可查看包含通道名称和场值的工具提示。
- 启用网格以查看插值异常叠加层。
- 如果异常不清晰可见,更换调色板 — 首先尝试 Thermal 或 Seismic。
- 如果一个强异常掩盖了地图其余部分,启用高斯归一化。
- 使用图例打开/关闭传感器以隔离单个通道。
实时飞行模式
当无人机正在飞行并通过 PolarWave 移动应用流传数据时,任务显示在实时飞行下并实时更新。着陆后,已完成的任务作为常规扫描移至测量扫描。
故障排除
| 问题 | 可能原因 | 解决方法 |
|---|---|---|
| 地图只显示 GPS 轨迹,无色彩网格 | 网格化已禁用 | 在右侧面板中启用网格化开关 |
| 未检测到设备类型 | 文件名已重命名 | 使用下拉菜单手动选择正确的设备 |
| 无 GPS 轨迹可见 | 测量期间 GPS 未激活 | 启用 GPS 重新测量;在文本编辑器中打开文件,查找纬度/经度列 |
| 梯度值看起来不对 | 传感器距离不正确 | 在传感器距离字段中设置正确的物理传感器间距(米) |
| 上传失败 | 文件太大或格式不支持 | 确认文件是未修改的 FGA Logger 导出文件 |
航空测量最佳实践
- 以一致的高度和线间距(根据目标深度 1–3 m)飞平行线。
- 保持恒定速度以确保每条线上均匀的数据分布。
- 尽可能保持传感器高度低 — 磁信号强度随距离急剧下降。
- 对于多传感器系统,在测量前验证传感器偏移校准 — 不正确的值会移动轨迹位置并扭曲网格。
- 如果传感器轨迹显示不对应真实异常的横向偏移,使用采样偏移。