Modo Survey
O Modo Survey é projetado para levantamentos magnetométricos com rastreamento GPS — tanto para sistemas de drones aéreos quanto para registradores terrestres. Abre por padrão na vista Explorer: sua varredura sobreposta em um mapa de satélite ao vivo usando sua trilha GPS. A partir daí, você pode mudar para um mapa de cores 2D ou um modelo de superfície 3D.
Instrumentos suportados
| Instrumento | Tipo |
|---|---|
| PolarWave DroneRover Light | Aéreo — multissensor nível básico |
| PolarWave DroneRover Professional | Aéreo — multissensor profissional |
| PolarWave DroneRover Enterprise | Aéreo — multissensor empresarial |
| PolarWave DroneRover Enterprise Max | Aéreo — configuração máxima de sensores |
| FG Sensors FGA Logger | Terrestre — captura dados de até dois sensores de fluxgate |
A sobreposição do mapa requer dados GPS incorporados no seu arquivo. A maioria das exportações do FGA Logger os inclui automaticamente. Se a vista de mapa não estiver disponível após o upload, verifique se o GPS estava ativo durante o seu levantamento. Se não tiver certeza, abra o arquivo em um editor de texto e procure colunas de latitude/longitude ou sentenças NMEA perto do topo.
Carregar um arquivo de levantamento
- Vá para Survey em Instrumentos na navegação esquerda.
- Clique em Selecionar arquivo ou arraste e solte seu arquivo.
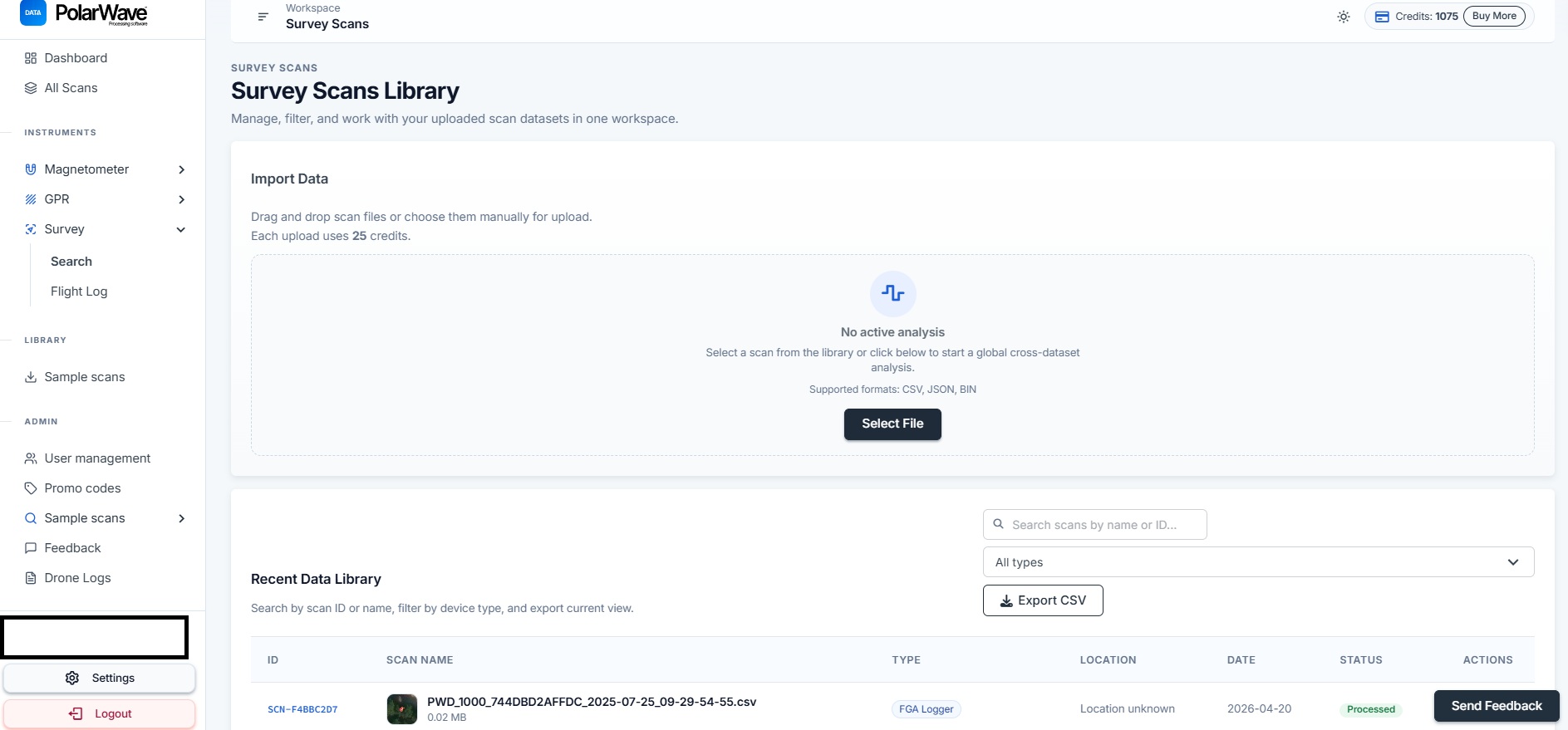
- A plataforma detecta o tipo de dispositivo automaticamente pelo nome do arquivo — mantenha o nome de arquivo original intacto.
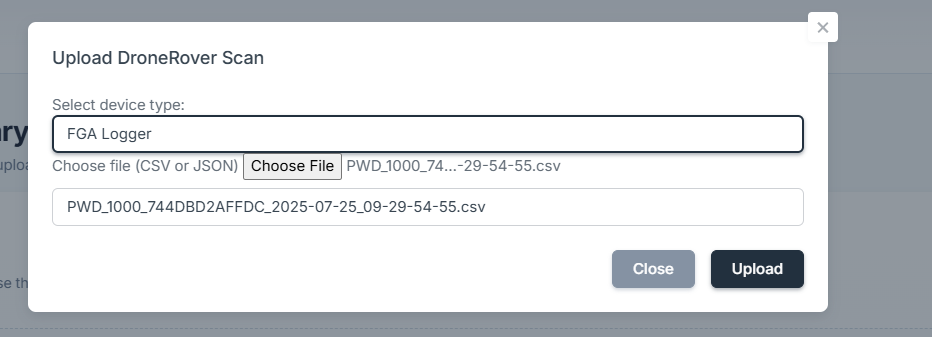
- Clique em Carregar — 25 créditos são cobrados.
- Clique na nova linha para abrir a vista de mapa. O processamento geralmente conclui em poucos segundos a um minuto.

Vistas
O Modo Survey oferece três formas de visualizar seus dados:
Vista Explorer (padrão)
Sua varredura sobreposta em um mapa de satélite ao vivo usando sua trilha GPS. Pontos individuais dos sensores são plotados ao longo da rota de voo ou levantamento. Passe o cursor sobre qualquer ponto para uma dica com o nome do canal e o valor de campo.
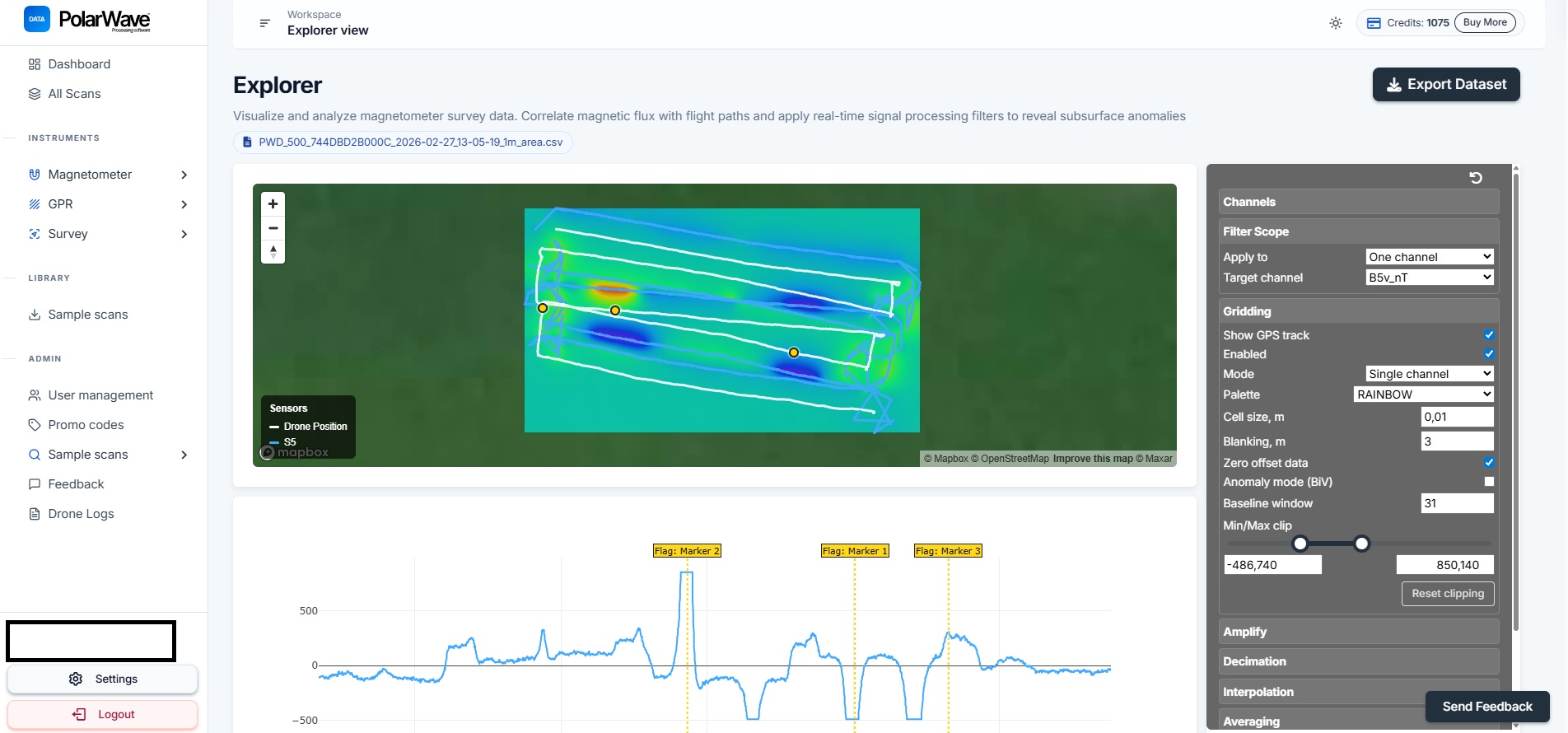
Ative o modo Grade para adicionar uma sobreposição de anomalias codificada por cores diretamente no mapa — todas as leituras de sensores selecionadas são interpoladas em uma grade regular e renderizadas sobre as imagens de satélite, para que você possa ver a forma e extensão das anomalias em seu contexto geográfico real.
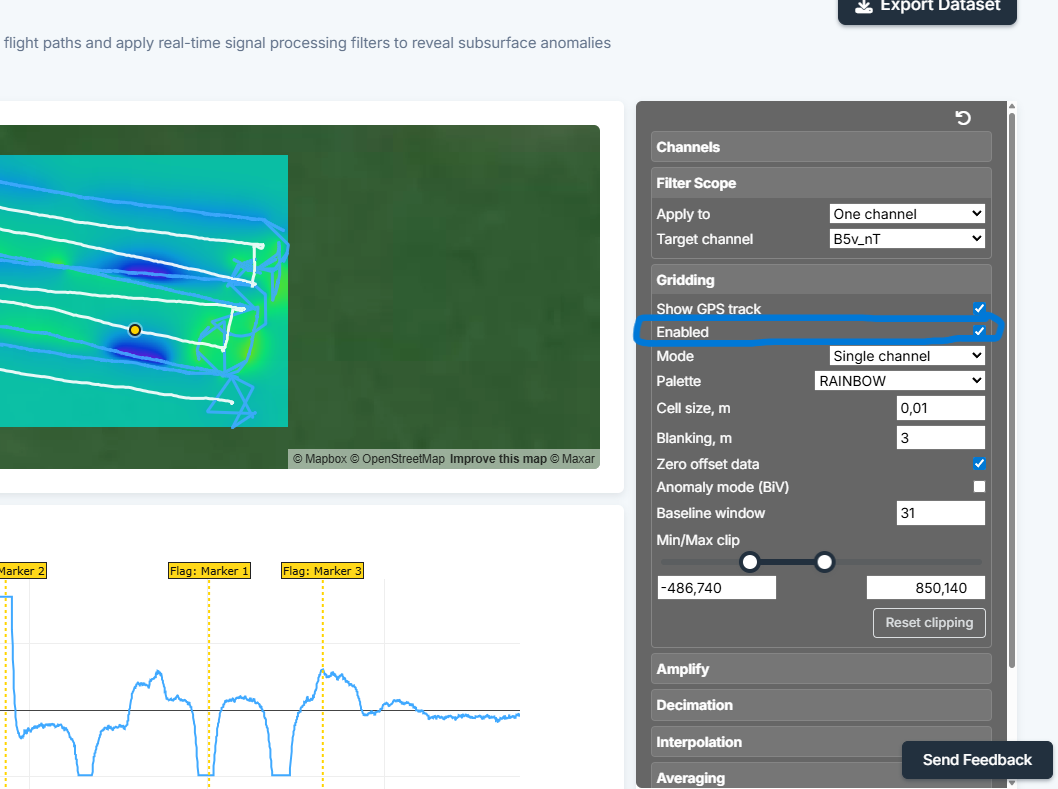
Se apenas uma linha de trilha GPS aparecer sem grade de cores, o gradeamento precisa ser ativado no painel direito.
Modelo de superfície 3D
Um renderizado 3D interativo mostrando a profundidade e forma das anomalias. Picos e vales representam variações de gradiente medidas na área levantada. Gire e faça zoom para inspecionar os dados de qualquer ângulo.

Controles do modelo 3D:
| Controle | Função |
|---|---|
| Girar | Clicar e arrastar para girar o modelo |
| Zoom | Rolar para cima/baixo |
| Deslocar | Clique direito e arrastar (ou dois dedos no trackpad) |
| Etiquetas | Clicar na superfície para colocar um marcador em um ponto de interesse |
| Exageração vertical | Escalar a altura de picos e vales |
Trilhas de sensores (sistemas de drones)
Cada sensor do DroneRover registra tanto leituras individuais por eixo quanto uma magnitude de vetor total em nanoteslas (nT). O nome do canal codifica o número do sensor (B1–B5), o componente (x/y/z para eixos individuais, v para vetor total) e a unidade (nT).
O número de canais disponíveis depende do seu modelo DroneRover — sistemas de nível básico começam com dois sensores; o Enterprise Max fornece todos os cinco.
Canais de eixo (um conjunto por sensor):
| Canal | Descrição |
|---|---|
| B1x / B2x … B5x | Leitura do eixo X por sensor (nT) |
| B1y / B2y … B5y | Leitura do eixo Y por sensor (nT) |
| B1z / B2z … B5z | Leitura do eixo Z por sensor (nT) |
Canais de vetor — exibidos como trilhas coloridas no mapa:
| Canal | Descrição | Cor |
|---|---|---|
| B1v_nT | Sensor 1 — magnitude total do vetor (nT) | Vermelho |
| B2v_nT | Sensor 2 — magnitude total do vetor (nT) | Laranja |
| B3v_nT | Sensor 3 — magnitude total do vetor (nT) | Amarelo |
| B4v_nT | Sensor 4 — magnitude total do vetor (nT) | Verde |
| B5v_nT | Sensor 5 — magnitude total do vetor (nT) | Azul |
Ative ou desative canais individuais usando a legenda para isolar um único sensor, ou ative Todos selecionados para combiná-los em uma grade.
Grade de anomalias
Quando o modo Grade está ativado, todas as leituras de sensores selecionadas são combinadas e interpoladas em uma sobreposição codificada por cores. Levantamentos grandes podem levar alguns segundos para renderizar.
Canais do FGA Logger
O FGA Logger registra até dois sensores de fluxgate (B1 e B2), cada um com três eixos mais uma magnitude de vetor total. Todos os canais disponíveis estão listados no topo do painel direito.
| Canal | Descrição |
|---|---|
| B1x / B1y / B1z | Leituras de eixos individuais — sensor 1 |
| B2x / B2y / B2z | Leituras de eixos individuais — sensor 2 |
| B1v | Magnitude total do vetor — sensor 1 (nT) |
| B2v | Magnitude total do vetor — sensor 2 (nT) |
| Gx / Gy / Gz | Gradiente entre sensores, por eixo (nT/m) |
| Gv | Magnitude total do vetor gradiente (nT/m) |
Clique em Todos para mostrar todos os canais, Nenhum para desselecionar todos, ou ative e desative canais individuais.
Gv (gradiente total) combina os três eixos em um único valor e é o mais sensível a anomalias localizadas. Comece aqui para a maioria dos levantamentos.
Configuração de distância entre sensores
Defina a Distância entre sensores como a separação física entre seus dois sensores de fluxgate em metros. Este valor é usado para calcular o gradiente — uma distância incorreta vai escalar incorretamente as medições de gradiente.
Controles do mapa
Seletor de paleta
Onze paletas de cores estão disponíveis para a sobreposição de grade:
| Paleta | Melhor para |
|---|---|
| Thermal | Detecção geral de anomalias |
| Viridis | Perceptualmente uniforme, boa para publicações |
| Rainbow | Contraste máximo de cor |
| Grayscale | Impressão / acessibilidade |
| Seismic | Bipolar — útil quando o sinal está centrado perto de zero |
| Inferno | Tema escuro de alto contraste |
| Plasma | Vibrante, boa em fundos escuros |
| Magma | Ênfase em baixa luminosidade |
Modo de gradeamento
- Canal único — mostra um sensor de cada vez, útil para comparar sensores individualmente
- Todos selecionados — combina todos os sensores visíveis em uma única grade
Normalização gaussiana
Redistribui a escala de cores para que anomalias sutis sejam visíveis mesmo quando uma única característica forte dominaria a exibição.
Deslocamento de amostra
Aplica um deslocamento de alinhamento temporal a sensores individuais. Use isso para corrigir pequenos deslocamentos de posição entre trilhas de sensores que não correspondem a anomalias reais.
Lendo o mapa
- Aproximar em uma área de interesse para ver pontos individuais das trilhas de sensores. Passe o cursor sobre um ponto para uma dica com o nome do canal e o valor de campo.
- Ativar Grade para ver a sobreposição interpolada de anomalias.
- Mudar a paleta se as anomalias não estiverem claramente visíveis — tente Thermal ou Seismic primeiro.
- Ativar a normalização gaussiana se uma anomalia forte estiver eliminando o resto do mapa.
- Ativar/desativar sensores usando a legenda para isolar canais individuais.
Modo de voo ao vivo
Quando um drone está voando ativamente e transmitindo dados pelo aplicativo móvel PolarWave, a missão aparece em Voos ao vivo e é atualizada em tempo real. Após o pouso, a missão concluída é movida para Varreduras de levantamento como uma varredura regular.
Solução de problemas
| Problema | Causa provável | Solução |
|---|---|---|
| O mapa mostra apenas trilha GPS, sem grade colorida | O gradeamento está desativado | Ativar o botão de gradeamento no painel direito |
| Tipo de dispositivo não detectado | O nome do arquivo foi renomeado | Usar o menu suspenso para selecionar o dispositivo correto manualmente |
| Nenhuma trilha GPS visível | O GPS não estava ativo durante o levantamento | Refazer o levantamento com GPS ativo; verificar abrindo o arquivo em um editor de texto e procurando colunas lat/lon |
| Os valores de gradiente parecem incorretos | Distância entre sensores incorreta | Definir a separação física correta entre sensores em metros no campo Distância entre sensores |
| O upload falha | Arquivo muito grande ou formato não suportado | Verificar se o arquivo é uma exportação sem modificações do FGA Logger |
Melhores práticas para levantamentos aéreos
- Voar linhas paralelas em altitude constante e espaçamento de linhas (1–3 m dependendo da profundidade alvo).
- Manter velocidade constante para distribuição uniforme dos dados ao longo de cada linha.
- Manter a altitude do sensor tão baixa quanto possível com segurança — a intensidade do sinal magnético diminui rapidamente com a distância.
- Para sistemas multissensor, verificar a calibração de deslocamento de sensores antes do levantamento — valores incorretos deslocam posições de trilhas e distorcem a grade.
- Usar Deslocamento de amostra se as trilhas de sensores mostrarem deslocamentos laterais que não correspondem a anomalias reais.