Mode Survey
Le Mode Survey est conçu pour les levés magnétomètre avec suivi GPS — aussi bien pour les systèmes de drones aériens que pour les enregistreurs terrestres. Il s'ouvre par défaut en vue Explorer : votre scan superposé sur une carte satellite en direct avec votre trace GPS. De là, vous pouvez basculer vers une carte de couleurs 2D ou un modèle de surface 3D.
Instruments pris en charge
| Instrument | Type |
|---|---|
| PolarWave DroneRover Light | Aérien — multi-capteur entrée de gamme |
| PolarWave DroneRover Professional | Aérien — multi-capteur professionnel |
| PolarWave DroneRover Enterprise | Aérien — multi-capteur entreprise |
| PolarWave DroneRover Enterprise Max | Aérien — configuration capteurs maximale |
| FG Sensors FGA Logger | Au sol — capture des données de jusqu'à deux capteurs fluxgate |
La superposition de carte nécessite des données GPS intégrées dans votre fichier. La plupart des exports FGA Logger les incluent automatiquement. Si la vue carte n'est pas disponible après le téléversement, vérifiez que le GPS était actif pendant votre levé. Si vous n'êtes pas sûr, ouvrez le fichier dans un éditeur de texte et recherchez des colonnes latitude/longitude ou des phrases NMEA près du début.
Téléverser un fichier de levé
- Allez dans Survey sous Instruments dans la navigation de gauche.
- Cliquez sur Sélectionner un fichier ou glissez-déposez votre fichier.
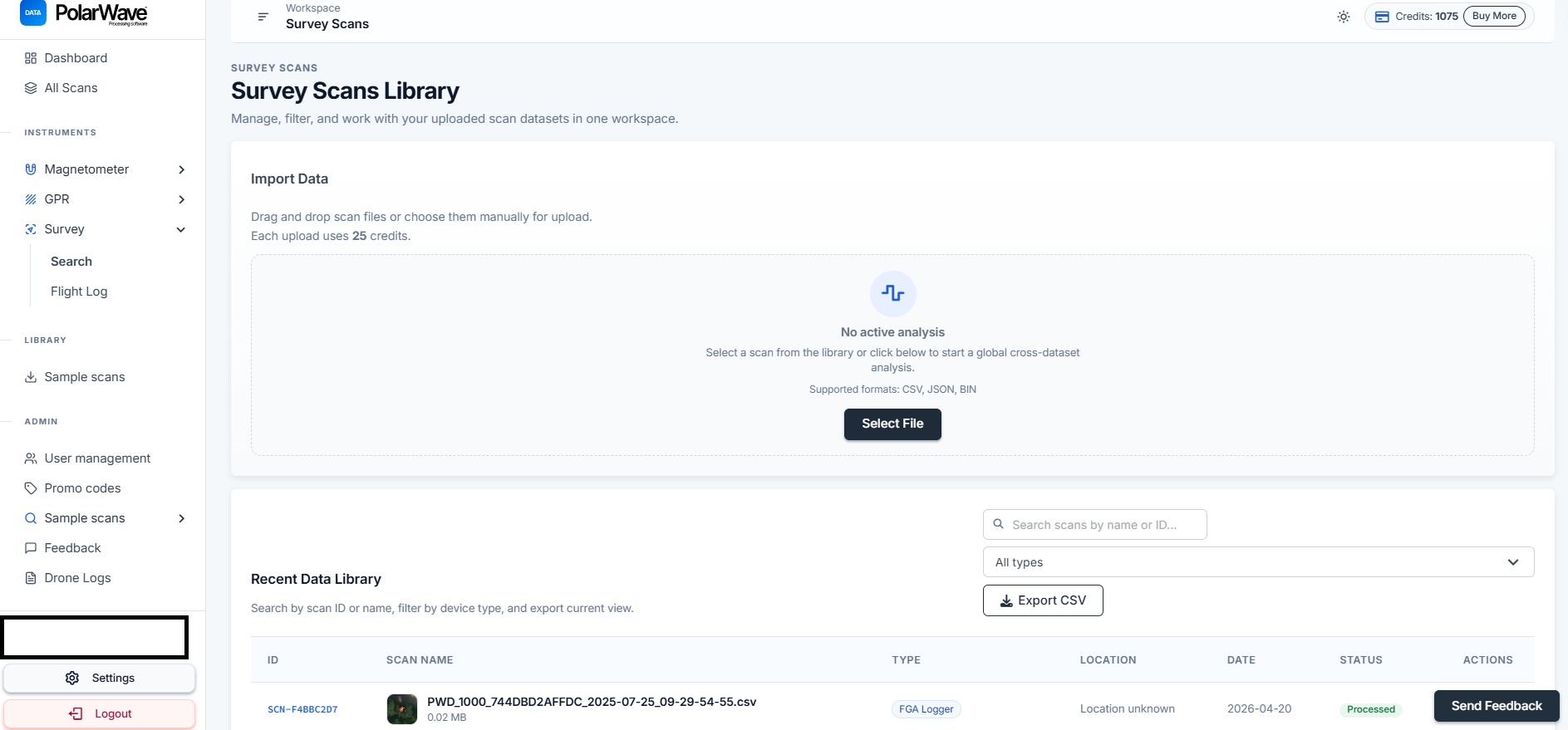
- La plateforme détecte automatiquement le type d'appareil d'après le nom de fichier — conservez le nom de fichier d'origine intact.
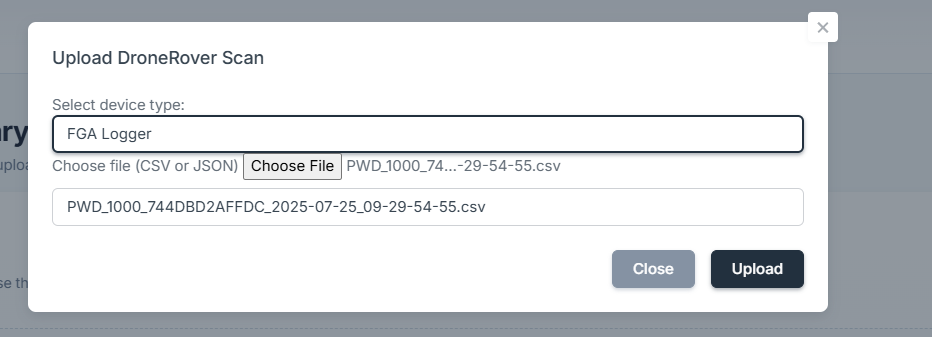
- Cliquez sur Téléverser — 25 crédits sont déduits.
- Cliquez sur la nouvelle ligne pour ouvrir la vue carte. Le traitement se termine généralement en quelques secondes à une minute.

Vues
Le Mode Survey offre trois façons de visualiser vos données :
Vue Explorer (par défaut)
Votre scan superposé sur une carte satellite en direct avec votre trace GPS. Les points individuels des capteurs sont tracés le long du trajet de vol ou de levé. Survolez n'importe quel point pour un info-bulle avec le nom du canal et la valeur de champ.
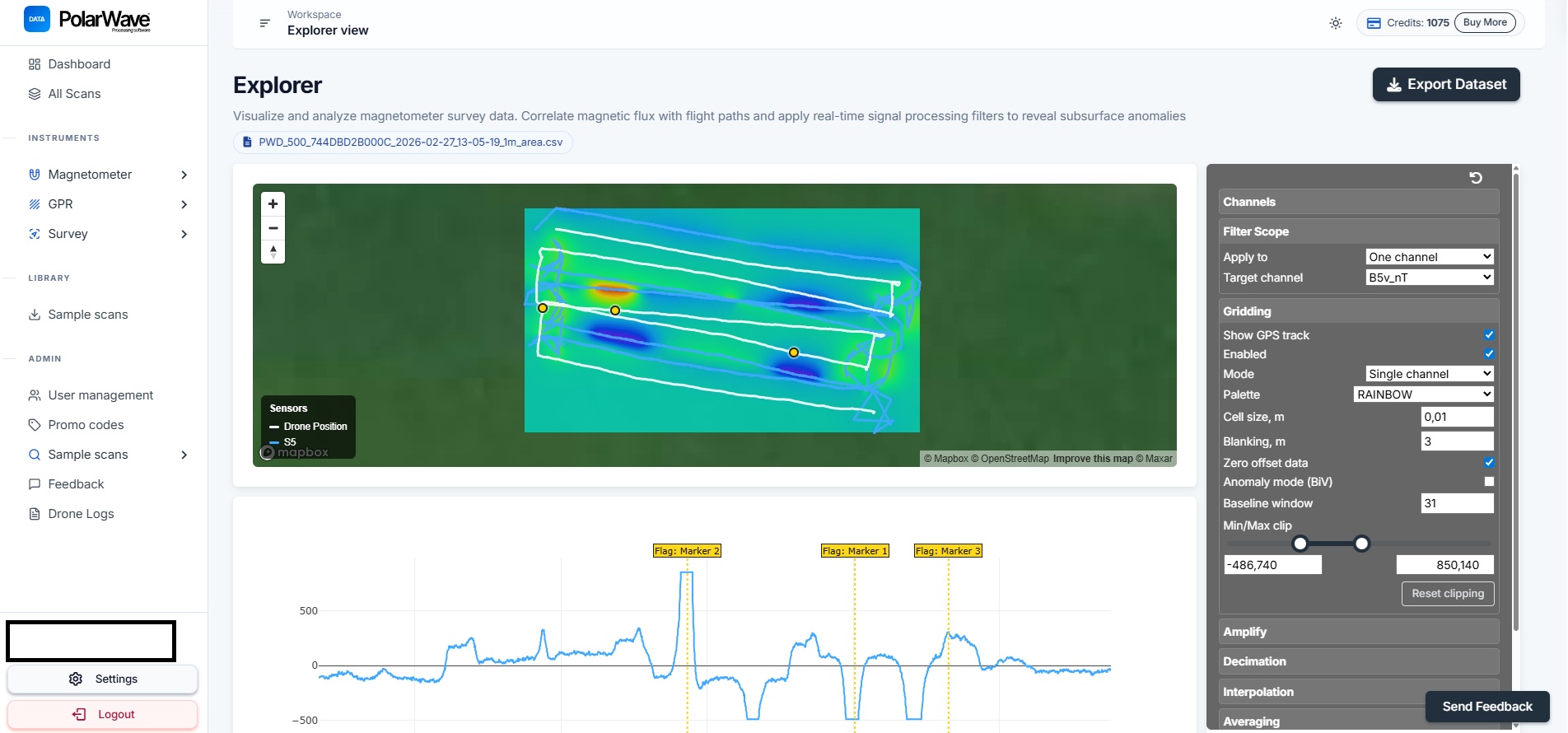
Activez le mode Grille pour ajouter une superposition d'anomalies codée par couleur directement sur la carte — toutes les lectures de capteurs sélectionnées sont interpolées sur une grille régulière et rendues sur l'imagerie satellite, pour que vous puissiez voir la forme et l'étendue des anomalies dans leur contexte géographique réel.
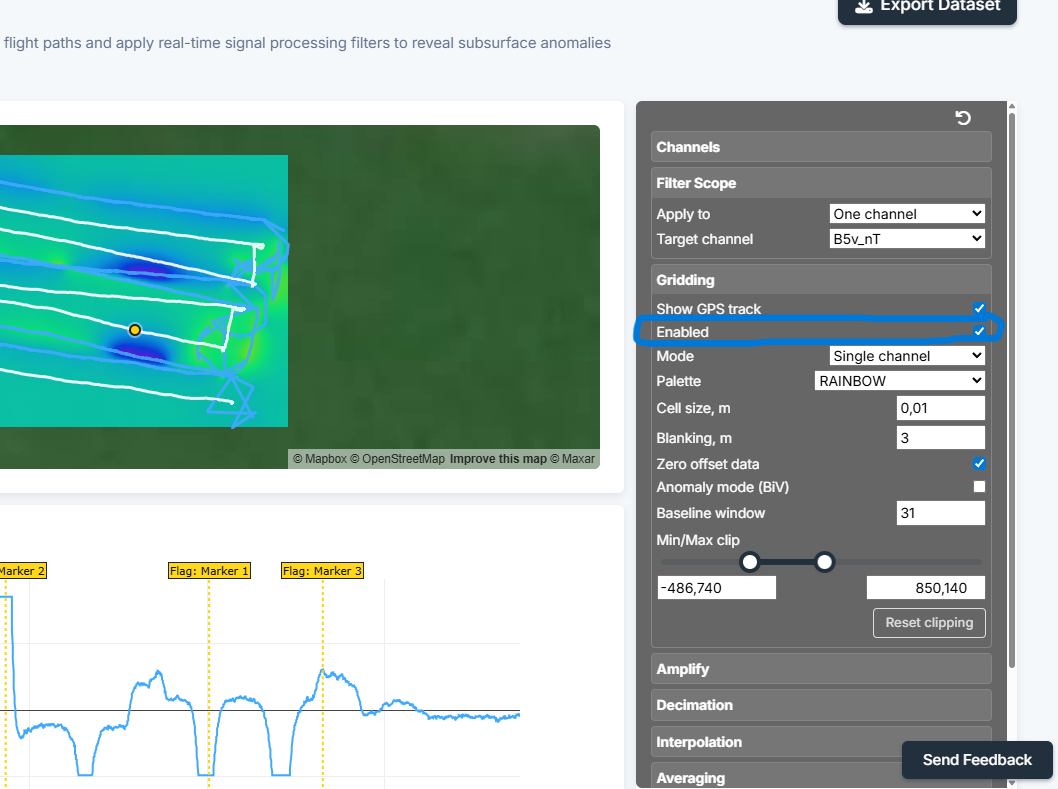
Si seule une ligne de trace GPS apparaît sans grille de couleurs, le quadrillage doit être activé dans le panneau de droite.
Modèle de surface 3D
Un rendu 3D interactif montrant la profondeur et la forme des anomalies. Les pics et creux représentent les variations de gradient mesurées sur la zone levée. Faites pivoter et zoomez pour inspecter les données sous n'importe quel angle.

Commandes du modèle 3D :
| Commande | Fonction |
|---|---|
| Faire pivoter | Cliquer et glisser pour faire tourner le modèle |
| Zoom | Faire défiler vers le haut/bas |
| Déplacer | Clic droit et glisser (ou trackpad deux doigts) |
| Tags | Cliquer sur la surface pour placer un marqueur sur un point d'intérêt |
| Exagération verticale | Mettre à l'échelle la hauteur des pics et creux |
Traces de capteurs (systèmes de drones)
Chaque capteur DroneRover enregistre à la fois des lectures d'axe individuelles et une magnitude de vecteur total en nanoteslas (nT). Le nom du canal encode le numéro de capteur (B1–B5), le composant (x/y/z pour les axes individuels, v pour le vecteur total) et l'unité (nT).
Le nombre de canaux disponibles dépend de votre modèle DroneRover — les systèmes d'entrée de gamme commencent à deux capteurs ; l'Enterprise Max fournit les cinq.
Canaux d'axe (un ensemble par capteur) :
| Canal | Description |
|---|---|
| B1x / B2x … B5x | Lecture de l'axe X par capteur (nT) |
| B1y / B2y … B5y | Lecture de l'axe Y par capteur (nT) |
| B1z / B2z … B5z | Lecture de l'axe Z par capteur (nT) |
Canaux vectoriels — affichés comme traces colorées sur la carte :
| Canal | Description | Couleur |
|---|---|---|
| B1v_nT | Capteur 1 — magnitude de vecteur total (nT) | Rouge |
| B2v_nT | Capteur 2 — magnitude de vecteur total (nT) | Orange |
| B3v_nT | Capteur 3 — magnitude de vecteur total (nT) | Jaune |
| B4v_nT | Capteur 4 — magnitude de vecteur total (nT) | Vert |
| B5v_nT | Capteur 5 — magnitude de vecteur total (nT) | Bleu |
Activez ou désactivez les canaux individuels via la légende pour isoler un seul capteur, ou activez Tous sélectionnés pour les combiner dans une seule grille.
Grille d'anomalies
Lorsque le mode Grille est activé, toutes les lectures de capteurs sélectionnées sont combinées et interpolées sur une superposition codée par couleur. Les grands levés peuvent prendre quelques secondes à rendre.
Canaux FGA Logger
Le FGA Logger enregistre jusqu'à deux capteurs fluxgate (B1 et B2), chacun avec trois axes plus une magnitude de vecteur total. Tous les canaux disponibles sont répertoriés en haut du panneau de droite.
| Canal | Description |
|---|---|
| B1x / B1y / B1z | Lectures d'axes individuels — capteur 1 |
| B2x / B2y / B2z | Lectures d'axes individuels — capteur 2 |
| B1v | Magnitude de vecteur total — capteur 1 (nT) |
| B2v | Magnitude de vecteur total — capteur 2 (nT) |
| Gx / Gy / Gz | Gradient entre capteurs, par axe (nT/m) |
| Gv | Magnitude totale du vecteur gradient (nT/m) |
Cliquez sur Tous pour afficher tous les canaux, Aucun pour tout désélectionner, ou activez et désactivez les canaux individuellement.
Gv (gradient total) combine les trois axes en une seule valeur et est le plus sensible aux anomalies localisées. Commencez ici pour la plupart des levés.
Réglage de la distance entre capteurs
Réglez la Distance entre capteurs sur la séparation physique entre vos deux capteurs fluxgate en mètres. Cette valeur est utilisée pour calculer le gradient — une distance incorrecte mettra à l'échelle incorrectement les mesures de gradient.
Commandes de la carte
Sélecteur de palette
Onze palettes de couleurs sont disponibles pour la superposition de grille :
| Palette | Meilleure utilisation |
|---|---|
| Thermal | Détection générale d'anomalies |
| Viridis | Perceptuellement uniforme, bonne pour les publications |
| Rainbow | Contraste de couleur maximal |
| Grayscale | Impression / accessibilité |
| Seismic | Bipolaire — utile quand le signal est centré près de zéro |
| Inferno | Thème sombre à fort contraste |
| Plasma | Vif, bon sur fond sombre |
| Magma | Mise en valeur basse luminosité |
Mode de quadrillage
- Canal unique — affiche un capteur à la fois, utile pour comparer les capteurs individuellement
- Tous sélectionnés — combine tous les capteurs visibles dans une seule grille
Normalisation gaussienne
Redistribue l'échelle de couleur pour que les anomalies subtiles soient visibles même quand une seule caractéristique forte dominerait autrement l'affichage.
Décalage d'échantillon
Applique un décalage d'alignement temporel aux capteurs individuels. Utilisez-le pour corriger les petits décalages de position entre les traces de capteurs qui ne correspondent pas à de vraies anomalies.
Lire la carte
- Zoomer sur une zone d'intérêt pour voir les points individuels des traces de capteurs. Survolez un point pour un info-bulle avec le nom du canal et la valeur de champ.
- Activer la Grille pour voir la superposition interpolée d'anomalies.
- Changer la palette si les anomalies ne sont pas clairement visibles — essayez d'abord Thermal ou Seismic.
- Activer la normalisation gaussienne si une anomalie forte masque le reste de la carte.
- Activer/désactiver les capteurs via la légende pour isoler des canaux individuels.
Mode vol en direct
Lorsqu'un drone vole activement et diffuse des données via l'application mobile PolarWave, la mission apparaît sous Vols en direct et se met à jour en temps réel. Après l'atterrissage, la mission terminée est déplacée vers Scans de levé comme un scan ordinaire.
Dépannage
| Problème | Cause probable | Solution |
|---|---|---|
| La carte n'affiche qu'une trace GPS, pas de grille colorée | Le quadrillage est désactivé | Activer le bouton de quadrillage dans le panneau de droite |
| Type d'appareil non détecté | Le nom de fichier a été renommé | Utiliser le menu déroulant pour sélectionner manuellement le bon appareil |
| Aucune trace GPS visible | Le GPS n'était pas actif pendant le levé | Refaire le levé avec le GPS activé ; vérifier en ouvrant le fichier dans un éditeur de texte et en cherchant les colonnes lat/lon |
| Les valeurs de gradient semblent incorrectes | Distance entre capteurs incorrecte | Saisir la séparation physique correcte entre capteurs en mètres dans le champ Distance entre capteurs |
| L'upload échoue | Fichier trop grand ou format non supporté | Vérifier que le fichier est un export FGA Logger non modifié |
Bonnes pratiques pour les levés aériens
- Voler des lignes parallèles à altitude constante et espacement de lignes (1–3 m selon la profondeur cible).
- Maintenir une vitesse constante pour une distribution uniforme des données le long de chaque ligne.
- Garder l'altitude du capteur aussi basse que possible en toute sécurité — la force du signal magnétique décroît rapidement avec la distance.
- Pour les systèmes multi-capteurs, vérifier l'étalonnage du décalage des capteurs avant le levé — des valeurs incorrectes décalent les positions des traces et déforment la grille.
- Utiliser le Décalage d'échantillon si les traces de capteurs montrent des décalages latéraux qui ne correspondent pas à de vraies anomalies.