Modo Survey
El Modo Survey está diseñado para levantamientos magnetométricos con seguimiento GPS — tanto para sistemas de drones aéreos como para registradores terrestres. Se abre de forma predeterminada en la vista Explorer: su escaneo superpuesto en un mapa satélite en vivo usando su rastro GPS. Desde allí puede cambiar a un mapa de color 2D o a un modelo de superficie 3D.
Instrumentos compatibles
| Instrumento | Tipo |
|---|---|
| PolarWave DroneRover Light | Aéreo — multisensor de nivel básico |
| PolarWave DroneRover Professional | Aéreo — multisensor profesional |
| PolarWave DroneRover Enterprise | Aéreo — multisensor empresarial |
| PolarWave DroneRover Enterprise Max | Aéreo — configuración máxima de sensores |
| FG Sensors FGA Logger | Terrestre — captura datos de hasta dos sensores de fluxgate |
La superposición de mapa requiere datos GPS integrados en su archivo. La mayoría de las exportaciones del FGA Logger los incluyen automáticamente. Si la vista de mapa no está disponible después de la carga, verifique que el GPS estaba activo durante su levantamiento. Si no está seguro, abra el archivo en un editor de texto y busque columnas de latitud/longitud o sentencias NMEA cerca de la parte superior.
Cargar un archivo de levantamiento
- Vaya a Survey bajo Instrumentos en la navegación izquierda.
- Haga clic en Seleccionar archivo o arrastre y suelte su archivo.
- La plataforma detecta automáticamente el tipo de dispositivo por el nombre de archivo — mantenga el nombre de archivo original intacto.
- Haga clic en Cargar — se cargan 25 créditos.
- Haga clic en la nueva fila para abrir la vista de mapa. El procesamiento suele completarse en pocos segundos a un minuto.

Vistas
El Modo Survey ofrece tres formas de visualizar sus datos:
Vista Explorer (predeterminada)
Su escaneo superpuesto en un mapa satélite en vivo usando su rastro GPS. Los puntos individuales de los sensores se trazan a lo largo del recorrido de vuelo o levantamiento. Pase el cursor sobre cualquier punto para un tooltip con el nombre del canal y el valor de campo.
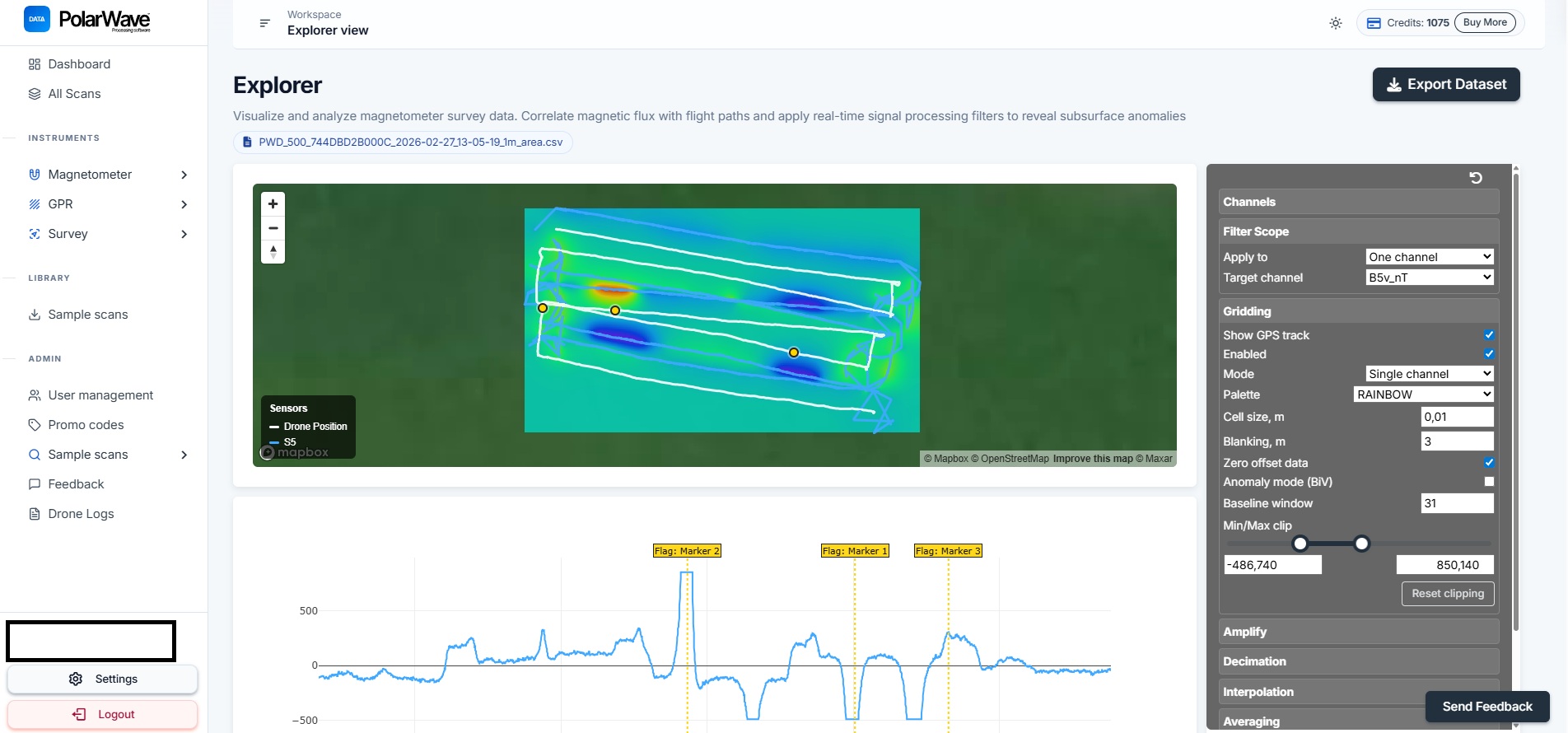
Active el modo Cuadrícula para añadir una superposición de anomalías codificada por color directamente en el mapa — todas las lecturas de sensores seleccionadas se interpolan en una cuadrícula regular y se renderizan sobre las imágenes satelitales, para que pueda ver la forma y extensión de las anomalías en su contexto geográfico real.
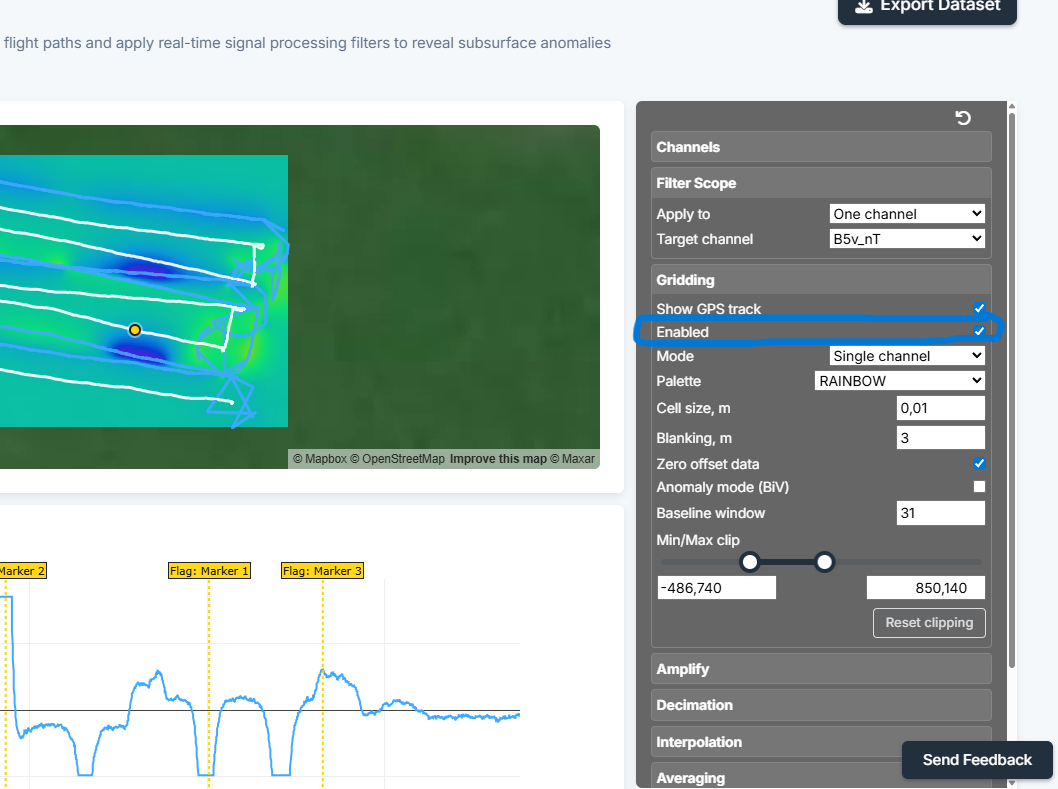
Si solo aparece una línea de rastro GPS sin cuadrícula de color, la cuadriculación debe activarse en el panel derecho.
Modelo de superficie 3D
Un renderizado 3D interactivo que muestra la profundidad y forma de las anomalías. Los picos y valles representan variaciones de gradiente medidas sobre el área levantada. Gire y haga zoom para inspeccionar los datos desde cualquier ángulo.

Controles del modelo 3D:
| Control | Función |
|---|---|
| Rotar | Hacer clic y arrastrar para girar el modelo |
| Zoom | Desplazar hacia arriba/abajo |
| Desplazar | Clic derecho y arrastrar (o dos dedos en el trackpad) |
| Etiquetas | Hacer clic en la superficie para colocar un marcador en un punto de interés |
| Exageración vertical | Escalar la altura de picos y valles |
Trayectorias de sensores (sistemas de drones)
Cada sensor del DroneRover registra tanto lecturas individuales por eje como una magnitud total del vector en nanoteslas (nT). El nombre del canal codifica el número de sensor (B1–B5), el componente (x/y/z para ejes individuales, v para vector total) y la unidad (nT).
El número de canales disponibles depende de su modelo de DroneRover — los sistemas de nivel básico comienzan con dos sensores; el Enterprise Max proporciona los cinco.
Canales de eje (un conjunto por sensor):
| Canal | Descripción |
|---|---|
| B1x / B2x … B5x | Lectura del eje X por sensor (nT) |
| B1y / B2y … B5y | Lectura del eje Y por sensor (nT) |
| B1z / B2z … B5z | Lectura del eje Z por sensor (nT) |
Canales de vector — mostrados como trayectorias de color en el mapa:
| Canal | Descripción | Color |
|---|---|---|
| B1v_nT | Sensor 1 — magnitud total del vector (nT) | Rojo |
| B2v_nT | Sensor 2 — magnitud total del vector (nT) | Naranja |
| B3v_nT | Sensor 3 — magnitud total del vector (nT) | Amarillo |
| B4v_nT | Sensor 4 — magnitud total del vector (nT) | Verde |
| B5v_nT | Sensor 5 — magnitud total del vector (nT) | Azul |
Active o desactive canales individuales usando la leyenda para aislar un solo sensor, o active Todos los seleccionados para combinarlos en una cuadrícula.
Cuadrícula de anomalías
Cuando el modo Cuadrícula está activado, todas las lecturas de sensores seleccionadas se combinan e interpolan en una superposición codificada por color. Los levantamientos grandes pueden tardar unos segundos en renderizarse.
Canales del FGA Logger
El FGA Logger registra hasta dos sensores de fluxgate (B1 y B2), cada uno con tres ejes más una magnitud total del vector. Todos los canales disponibles se enumeran en la parte superior del panel derecho.
| Canal | Descripción |
|---|---|
| B1x / B1y / B1z | Lecturas de ejes individuales — sensor 1 |
| B2x / B2y / B2z | Lecturas de ejes individuales — sensor 2 |
| B1v | Magnitud total del vector — sensor 1 (nT) |
| B2v | Magnitud total del vector — sensor 2 (nT) |
| Gx / Gy / Gz | Gradiente entre sensores, por eje (nT/m) |
| Gv | Magnitud total del vector de gradiente (nT/m) |
Haga clic en Todos para mostrar todos los canales, Ninguno para deseleccionar todos, o active o desactive canales individuales.
Gv (gradiente total) combina los tres ejes en un solo valor y es el más sensible a las anomalías localizadas. Comience aquí para la mayoría de los levantamientos.
Ajuste de distancia entre sensores
Configure la Distancia entre sensores a la separación física entre sus dos sensores de fluxgate en metros. Este valor se usa para calcular el gradiente — una distancia incorrecta escalará incorrectamente las mediciones de gradiente.
Controles del mapa
Selector de paleta
Hay once paletas de colores disponibles para la superposición de cuadrícula:
| Paleta | Mejor para |
|---|---|
| Thermal | Detección general de anomalías |
| Viridis | Perceptualmente uniforme, buena para publicaciones |
| Rainbow | Contraste máximo de color |
| Grayscale | Impresión / accesibilidad |
| Seismic | Bipolar — útil cuando la señal está centrada cerca de cero |
| Inferno | Tema oscuro de alto contraste |
| Plasma | Vibrante, buena sobre fondos oscuros |
| Magma | Énfasis en luz baja |
Modo de cuadriculación
- Canal único — muestra un sensor a la vez, útil para comparar sensores individualmente
- Todos los seleccionados — combina todos los sensores visibles en una sola cuadrícula
Normalización gaussiana
Redistribuye la escala de color para que las anomalías sutiles sean visibles incluso cuando una sola característica fuerte dominaría la visualización.
Desplazamiento de muestras
Aplica un desplazamiento de alineación temporal a sensores individuales. Úselo para corregir pequeños desplazamientos de posición entre trayectorias de sensores que no corresponden a anomalías reales.
Leyendo el mapa
- Acercar a un área de interés para ver puntos individuales de las trayectorias de sensores. Pase el cursor sobre un punto para un tooltip con el nombre del canal y el valor de campo.
- Activar Cuadrícula para ver la superposición interpolada de anomalías.
- Cambiar la paleta si las anomalías no son claramente visibles — pruebe primero Thermal o Seismic.
- Activar la normalización gaussiana si una anomalía fuerte está eliminando el resto del mapa.
- Activar/desactivar sensores usando la leyenda para aislar canales individuales.
Modo de vuelo en vivo
Cuando un dron está volando activamente y transmitiendo datos a través de la aplicación móvil PolarWave, la misión aparece bajo Vuelos en vivo y se actualiza en tiempo real. Después de aterrizar, la misión completada se mueve a Escaneos de levantamiento como un escaneo regular.
Solución de problemas
| Problema | Causa probable | Solución |
|---|---|---|
| El mapa muestra solo rastro GPS, sin cuadrícula de color | La cuadriculación está desactivada | Activar el control de cuadriculación en el panel derecho |
| Tipo de dispositivo no detectado | El nombre de archivo fue renombrado | Usar el desplegable para seleccionar el dispositivo correcto manualmente |
| No se ve rastro GPS | El GPS no estaba activo durante el levantamiento | Realizar el levantamiento nuevamente con GPS activado; verificar abriendo el archivo en un editor de texto y buscando columnas lat/lon |
| Los valores de gradiente parecen incorrectos | Distancia entre sensores incorrecta | Establecer la separación física correcta de sensores en metros en el campo Distancia entre sensores |
| El upload falla | Archivo muy grande o formato no compatible | Verificar que el archivo es una exportación sin modificar del FGA Logger |
Mejores prácticas para levantamientos aéreos
- Volar líneas paralelas a altitud constante y espaciado de líneas (1–3 m según la profundidad objetivo).
- Mantener velocidad constante para una distribución uniforme de los datos a lo largo de cada línea.
- Mantener la altitud del sensor tan baja como sea posible con seguridad — la intensidad de la señal magnética disminuye rápidamente con la distancia.
- Para sistemas multisensor, verificar la calibración de desplazamiento de sensores antes del levantamiento — valores incorrectos desplazan posiciones de trayectorias y distorsionan la cuadrícula.
- Usar Desplazamiento de muestras si las trayectorias de sensores muestran desplazamientos laterales que no corresponden a anomalías reales.