Survey-Modus
Der Survey-Modus ist für GPS-verfolgte Magnetometersurveys konzipiert — sowohl für Luft-Drohnensysteme als auch für bodengestützte Logger. Er öffnet standardmäßig in der Explorer-Ansicht: Ihr Scan überlagert auf einer Live-Satellitenkarte mit Ihrer GPS-Spur. Von dort können Sie zu einer 2D-Farbkarte oder einem 3D-Oberflächenmodell wechseln.
Unterstützte Instrumente
| Instrument | Typ |
|---|---|
| PolarWave DroneRover Light | Aerial — Einsteiger-Multisensor |
| PolarWave DroneRover Professional | Aerial — professioneller Multisensor |
| PolarWave DroneRover Enterprise | Aerial — Enterprise-Multisensor |
| PolarWave DroneRover Enterprise Max | Aerial — maximale Sensorkonfiguration |
| FG Sensors FGA Logger | Bodengestützt — erfasst Daten von bis zu zwei Fluxgate-Sensoren |
Die Kartenüberlagerung erfordert GPS-Daten in Ihrer Datei. Die meisten FGA Logger-Exporte enthalten diese automatisch. Wenn die Kartenansicht nach dem Upload nicht verfügbar ist, überprüfen Sie, ob GPS während Ihres Surveys aktiv war. Falls unsicher, öffnen Sie die Datei in einem Texteditor und suchen Sie nach Breiten-/Längengrad-Spalten oder NMEA-Sätzen am Anfang.
Survey-Datei hochladen
- Gehen Sie unter Instrumente in der linken Navigation zu Survey.
- Klicken Sie auf Datei auswählen oder ziehen Sie Ihre Datei per Drag-and-Drop.
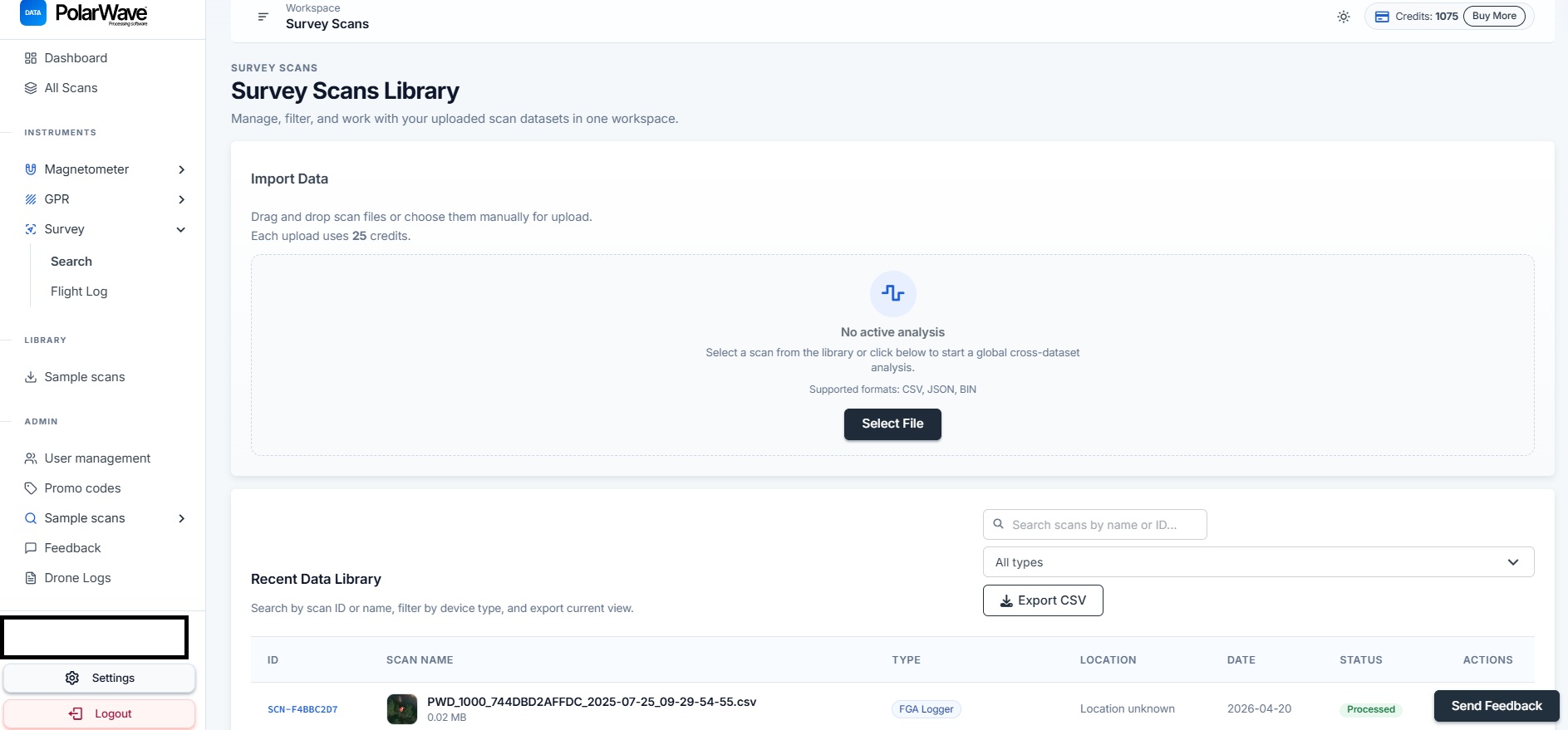
- Die Plattform erkennt den Gerätetyp automatisch anhand des Dateinamens — behalten Sie den ursprünglichen Dateinamen bei.
- Klicken Sie auf Hochladen — 25 Credits werden abgezogen.
- Klicken Sie auf die neue Zeile, um die Kartenansicht zu öffnen. Die Verarbeitung dauert in der Regel einige Sekunden bis eine Minute.

Ansichten
Der Survey-Modus bietet drei Möglichkeiten, Ihre Daten zu betrachten:
Explorer-Ansicht (Standard)
Ihr Scan überlagert auf einer Live-Satellitenkarte mit Ihrer GPS-Spur. Einzelne Sensorpunkte werden entlang des Flug- oder Surveypfads dargestellt. Fahren Sie mit der Maus über einen Punkt für einen Tooltip mit Kanalname und Feldwert.
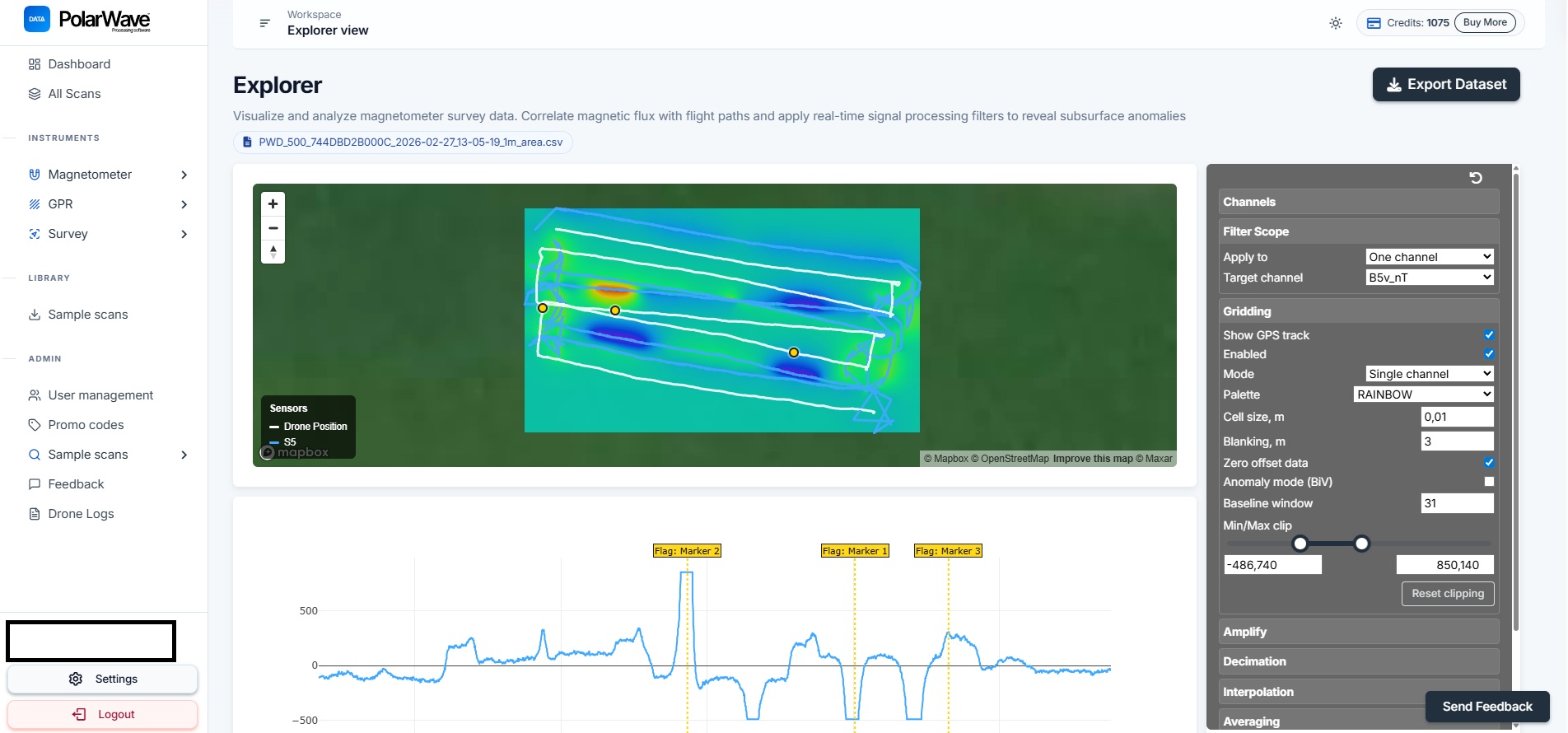
Aktivieren Sie den Gitter-Modus, um eine farbcodierte Anomalienüberlagerung direkt auf der Karte hinzuzufügen — alle ausgewählten Sensorabilesungen werden auf ein regelmäßiges Gitter interpoliert und über das Satellitenbild gerendert, sodass Sie Form und Ausdehnung von Anomalien in ihrem realen geografischen Kontext sehen können.
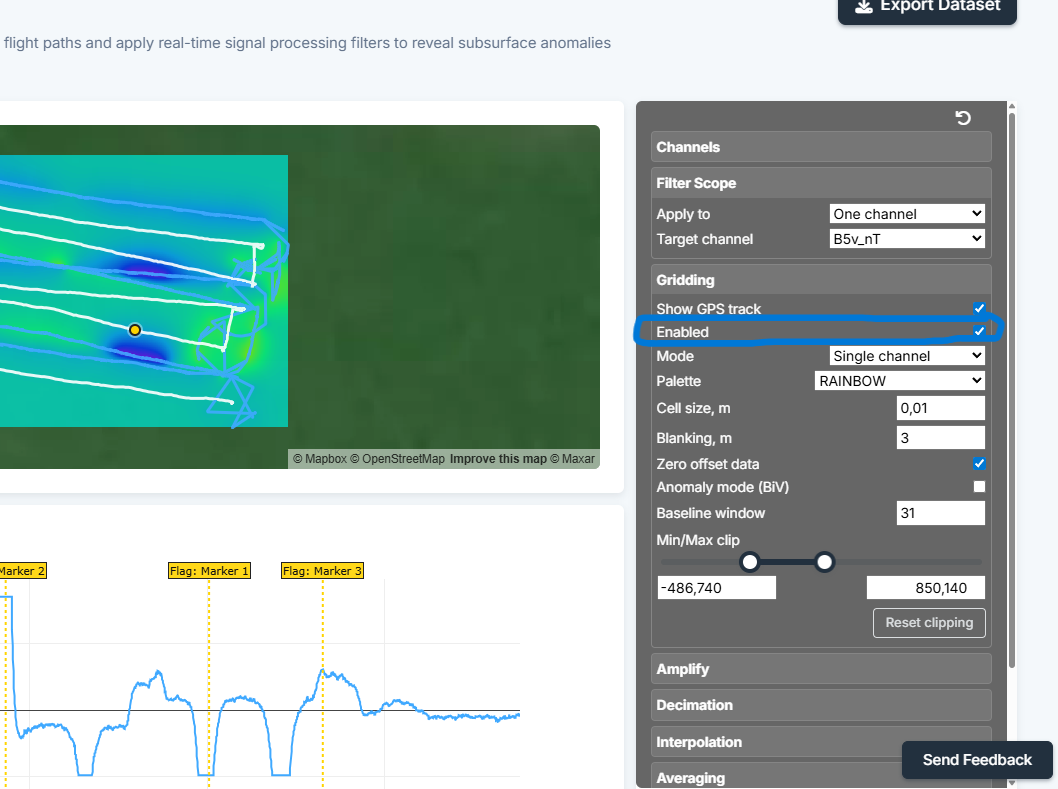
Wenn nur eine GPS-Spurlinie ohne Farbgitter erscheint, muss die Gitterung im rechten Panel aktiviert werden.
3D-Oberflächenmodell
Ein interaktives 3D-Rendering, das Tiefe und Form von Anomalien zeigt. Gipfel und Täler stellen gemessene Gradientenvariationen über dem untersuchten Bereich dar. Drehen und zoomen Sie, um die Daten aus jedem Winkel zu untersuchen.
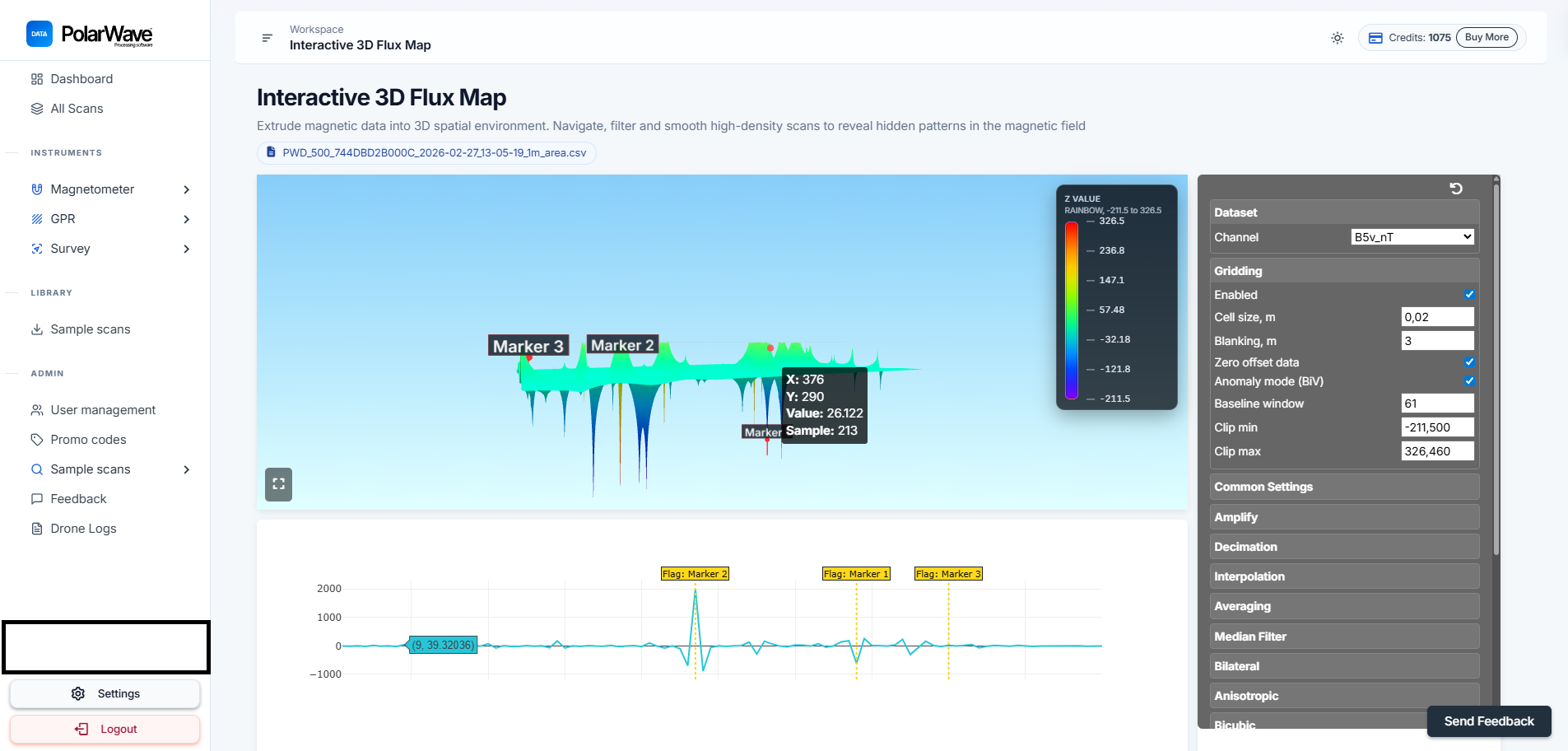
3D-Modell-Steuerungen:
| Steuerelement | Funktion |
|---|---|
| Drehen | Klicken und ziehen, um das Modell zu drehen |
| Zoom | Scrollen nach oben/unten |
| Schwenken | Rechtsklick und ziehen (oder Zwei-Finger-Trackpad) |
| Tags | Auf die Oberfläche klicken, um einen Marker zu setzen |
| Vertikale Überhöhung | Höhe von Gipfeln und Tälern skalieren |
Sensorspuren (Drohnensysteme)
Jeder DroneRover-Sensor erfasst sowohl einzelne Achsenwerte als auch eine Gesamtvektorgröße in Nanotesla (nT). Der Kanalname kodiert die Sensornummer (B1–B5), die Komponente (x/y/z für einzelne Achsen, v für Gesamtvektor) und die Einheit (nT).
Die Anzahl der verfügbaren Kanäle hängt von Ihrem DroneRover-Modell ab — Einsteigersysteme beginnen bei zwei Sensoren; das Enterprise Max bietet alle fünf.
Achsenkanäle (ein Satz pro Sensor):
| Kanal | Beschreibung |
|---|---|
| B1x / B2x … B5x | X-Achsen-Ablesewert pro Sensor (nT) |
| B1y / B2y … B5y | Y-Achsen-Ablesewert pro Sensor (nT) |
| B1z / B2z … B5z | Z-Achsen-Ablesewert pro Sensor (nT) |
Vektorkanäle — als farbige Spuren auf der Karte angezeigt:
| Kanal | Beschreibung | Farbe |
|---|---|---|
| B1v_nT | Sensor 1 — Gesamtvektorgröße (nT) | Rot |
| B2v_nT | Sensor 2 — Gesamtvektorgröße (nT) | Orange |
| B3v_nT | Sensor 3 — Gesamtvektorgröße (nT) | Gelb |
| B4v_nT | Sensor 4 — Gesamtvektorgröße (nT) | Grün |
| B5v_nT | Sensor 5 — Gesamtvektorgröße (nT) | Blau |
Schalten Sie einzelne Kanäle über die Legende ein oder aus, um einen einzelnen Sensor zu isolieren, oder aktivieren Sie Alle ausgewählt, um sie in einem Gitter zu kombinieren.
Anomaliegitter
Wenn der Gitter-Modus aktiviert ist, werden alle ausgewählten Sensorabilesungen kombiniert und auf eine farbcodierte Überlagerung interpoliert. Große Surveys benötigen möglicherweise einige Sekunden zum Rendern.
FGA Logger-Kanäle
Der FGA Logger zeichnet bis zu zwei Fluxgate-Sensoren (B1 und B2) auf, jeweils mit drei Achsen plus einer Gesamtvektorgröße. Alle verfügbaren Kanäle sind oben im rechten Panel aufgeführt.
| Kanal | Beschreibung |
|---|---|
| B1x / B1y / B1z | Einzelne Achsenwerte — Sensor 1 |
| B2x / B2y / B2z | Einzelne Achsenwerte — Sensor 2 |
| B1v | Gesamtvektorgröße — Sensor 1 (nT) |
| B2v | Gesamtvektorgröße — Sensor 2 (nT) |
| Gx / Gy / Gz | Gradient zwischen Sensoren, pro Achse (nT/m) |
| Gv | Gesamtgradientvektorgröße (nT/m) |
Klicken Sie auf Alle, um jeden Kanal anzuzeigen, Keine, um alle abzuwählen, oder schalten Sie einzelne Kanäle ein und aus.
Gv (Gesamtgradient) kombiniert alle drei Achsen in einen einzigen Wert und ist am empfindlichsten gegenüber lokalisierten Anomalien. Beginnen Sie hier für die meisten Surveys.
Sensorabstandseinstellung
Stellen Sie den Sensorabstand auf den physischen Abstand zwischen Ihren zwei Fluxgate-Sensoren in Metern ein. Dieser Wert wird zur Berechnung des Gradienten verwendet — ein falscher Abstand skaliert die Gradientmessungen falsch.
Kartensteuerungen
Palettenauswahl
Elf Farbpaletten sind für die Gitterüberlagerung verfügbar:
| Palette | Am besten geeignet für |
|---|---|
| Thermal | Allgemeine Anomalieerkennung |
| Viridis | Wahrnehmungsgleichmäßig, gut für Publikationen |
| Rainbow | Maximaler Farbkontrast |
| Grayscale | Druck / Barrierefreiheit |
| Seismic | Bipolar — nützlich wenn Signal nahe Null zentriert ist |
| Inferno | Hochkontrast-Dunkelmodus |
| Plasma | Lebendig, gut auf dunklen Hintergründen |
| Magma | Betonung schwacher Signale |
Gittermodus
- Einzelkanal — zeigt einen Sensor nach dem anderen, nützlich für den individuellen Vergleich
- Alle ausgewählt — kombiniert alle sichtbaren Sensoren in einem einzigen Gitter
Gaußsche Normalisierung
Verteilt die Farbskala neu, sodass subtile Anomalien sichtbar sind, auch wenn ein einzelnes starkes Merkmal die Anzeige sonst dominieren würde.
Abtastverschiebung
Wendet einen Zeitausrichtungsversatz auf einzelne Sensoren an. Verwenden Sie dies, um kleine Positionsversätze zwischen Sensorspuren zu korrigieren, die keinen echten Anomalien entsprechen.
Die Karte lesen
- Heranzoomen zu einem interessanten Bereich, um einzelne Sensorpunkte zu sehen. Fahren Sie mit der Maus über einen Punkt für einen Tooltip mit Kanalname und Feldwert.
- Gitter aktivieren, um die interpolierte Anomalienüberlagerung zu sehen.
- Palette ändern, wenn Anomalien nicht klar sichtbar sind — versuchen Sie zuerst Thermal oder Seismic.
- Gaußsche Normalisierung aktivieren, wenn eine starke Anomalie den Rest der Karte überwältigt.
- Sensoren ein-/ausschalten über die Legende, um einzelne Kanäle zu isolieren.
Live-Flugmodus
Wenn eine Drohne aktiv fliegt und Daten durch die PolarWave-App streamt, erscheint die Mission unter Live-Flüge und aktualisiert sich in Echtzeit. Nach der Landung wird die abgeschlossene Mission als regulärer Scan unter Survey-Scans verschoben.
Fehlerbehebung
| Problem | Wahrscheinliche Ursache | Lösung |
|---|---|---|
| Karte zeigt nur GPS-Spur, kein Farbgitter | Gitterung ist deaktiviert | Gitterungs-Schalter im rechten Panel aktivieren |
| Gerätetyp nicht erkannt | Dateiname wurde umbenannt | Dropdown verwenden, um das richtige Gerät manuell auszuwählen |
| Keine GPS-Spur sichtbar | GPS war während des Surveys nicht aktiv | Survey mit aktiviertem GPS wiederholen; Datei in Texteditor öffnen und nach Lat/Lon-Spalten suchen |
| Gradientenwerte scheinen falsch | Falscher Sensorabstand | Den korrekten physischen Sensorabstand in Metern im Feld Sensorabstand einstellen |
| Upload schlägt fehl | Datei zu groß oder nicht unterstütztes Format | Sicherstellen, dass die Datei ein unveränderter FGA Logger-Export ist |
Best Practices für Luftsurveys
- Parallele Linien fliegen auf konstanter Höhe und Linienabstand (1–3 m je nach Zieltiefe).
- Konstante Geschwindigkeit halten für gleichmäßige Datenverteilung entlang jeder Linie.
- Sensorhöhe so niedrig wie sicher möglich halten — die magnetische Signalstärke fällt mit der Entfernung schnell ab.
- Bei Mehrfachsensorsystemen Sensorversatzkalibrierung vor dem Survey überprüfen — falsche Werte verschieben Spurpositionen und verzerren das Gitter.
- Abtastverschiebung verwenden, wenn Sensorspuren laterale Versätze zeigen, die keinen echten Anomalien entsprechen.